Как определить тип двигателя синхронный или асинхронный
Содержание:
- Однодневные поездки в Финляндию из Санкт-Петербурга
- Принцип действия [ править | править код ]
- Процедура запуска двигателя
- Сброс настроек на сигнализации Томагавк 9010
- Материалы для салона: Черная потолочная ткань на поролоне
- Способы возбуждения синхронных генераторов
- Трехфазный асинхронный двигатель с фазным ротором
- Разновидности синхронных машин[ | ]
- Синхронный и асинхронный генератор
- Краткая история создания
- Подключение асинхронного двигателя
Однодневные поездки в Финляндию из Санкт-Петербурга
Принцип действия [ править | править код ]
В основу работы подавляющего числа электрических машин положен принцип электромагнитной индукции. Электрическая машина состоит из неподвижной части — статора (для асинхронных и синхронных машин переменного тока) или индуктора (для машин постоянного тока) и подвижной части — ротора (для асинхронных и синхронных машин переменного тока) или якоря (для машин постоянного тока). В роли индуктора на маломощных двигателях постоянного тока очень часто используются постоянные магниты.
Ротор асинхронного двигателя может быть:
- короткозамкнутым;
- фазным (с обмоткой) — используются там, где необходимо уменьшить пусковой ток и регулировать частоту вращения асинхронного электродвигателя. В большинстве случаев это крановые электродвигатели серии МТН, которые повсеместно используются в крановых установках.
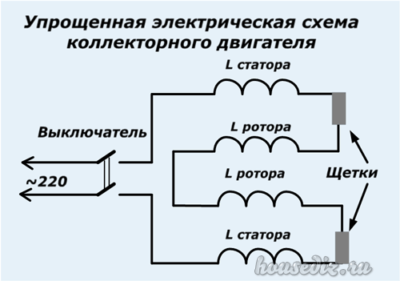
Якорь — это подвижная часть машин постоянного тока (двигателя или генератора) или же работающего по этому же принципу так называемого универсального двигателя (который используется в электроинструменте). По сути универсальный двигатель — это тот же двигатель постоянного тока (ДПТ) с последовательным возбуждением (обмотки якоря и индуктора включены последовательно). Отличие только в расчётах обмоток. На постоянном токе отсутствует реактивное (индуктивное или ёмкостное) сопротивление. Поэтому любая «болгарка», если из неё извлечь электронный блок, будет вполне работоспособна и на постоянном токе, но при меньшем напряжении сети.
Принцип действия трёхфазного асинхронного электродвигателя
При включении в сеть в статоре возникает круговое вращающееся магнитное поле, которое пронизывает короткозамкнутую обмотку ротора и наводит в ней ток индукции. Отсюда, следуя закону Ампера (на проводник с током, помещённый в магнитное поле, действует отклоняющая сила), ротор приходит во вращение. Частота вращения ротора зависит от частоты питающего напряжения и от числа пар магнитных полюсов.
Разность между частотой вращения магнитного поля статора и частотой вращения ротора характеризуется скольжением. Двигатель называется асинхронным, так как частота вращения магнитного поля статора не совпадает с частотой вращения ротора.
Синхронный двигатель имеет отличие в конструкции ротора. Ротор выполняется либо постоянным магнитом, либо электромагнитом, либо имеет в себе часть беличьей клетки (для запуска) и постоянные магниты или электромагниты. В синхронном двигателе частота вращения магнитного поля статора и частота вращения ротора совпадают. Для запуска используют вспомогательные асинхронные электродвигатели, либо ротор с короткозамкнутой обмоткой.
Асинхронные двигатели нашли широкое применение во всех отраслях техники. Особенно это касается простых по конструкции и прочных трёхфазных асинхронных двигателей с коротко-замкнутыми роторами, которые надёжнее и дешевле всех электрических двигателей и практически не требуют никакого ухода. Название «асинхронный» обусловлено тем, что в таком двигателе ротор вращается не синхронно со вращающимся полем статора. Там, где нет трёхфазной сети, асинхронный двигатель может включаться в сеть однофазного тока.
Статор асинхронного электродвигателя состоит, как и в синхронной машине, из пакета, набранного из лакированных листов электротехнической стали толщиной 0,5 мм, в пазах которого уложена обмотка. Три фазы обмотки статора асинхронного трёхфазного двигателя, пространственно смещённые на 120°, соединяются друг с другом звездой или треугольником.
На рисунке показана принципиальная схема двухполюсной машины — по четыре паза на каждую фазу. При питании обмоток статора от трёхфазной сети получается вращающееся поле, так как токи в фазах обмотки, которые смещены в пространстве на 120° друг относительно друга сдвинуты по фазе друг относительно друга на 120°.
Для синхронной частоты вращения nc поля электродвигателя с р парами полюсов справедливо при частоте тока f : n c = 60 f p =<60f>
>>
При частоте 50 Гц получаем для p = 1, 2, 3 (двух-, четырёх- и шести-полюсных машин) синхронные частоты вращения поля n c > = 3000, 1500 и 1000 об/мин.
Ротор асинхронного электродвигателя также состоит из листов электротехнической стали и может быть выполнен в виде короткозамкнутого ротора (с «беличьей клеткой») или ротора с контактными кольцами (фазный ротор).
Процедура запуска двигателя
Все синхронные двигатели оснащены «обмоткой короткозамкнутого ротора», состоящей из медных прутков, закороченных на обоих концах. Эти обмотки также служат для самостоятельного запуска синхронного двигателя. Во время запуска он легко запускается и действует как асинхронный двигатель. Для запуска синхронного двигателя сетевое напряжение подается на клеммы статора, а ротор остается не возбужденным. Он запускается как асинхронный двигатель, и когда он достигает скорости около 95% от своей синхронной скорости, на ротор подается слабое постоянное возбуждение. В результате чего ротор выравнивается синхронно со статором. В этот момент статор и полюса ротора сцепляются друг с другом и приводят двигатель в синхронность.
Сброс настроек на сигнализации Томагавк 9010
Материалы для салона: Черная потолочная ткань на поролоне
Способы возбуждения синхронных генераторов
Самым распространенным способом создания основного магнитного потока синхронных генераторов является электромагнитное возбуждение, состоящее в том, что на полюсах ротора располагают обмотку возбуждения, при прохождении по которой постоянного тока, возникает МДС, создающая в генераторе магнитное поле.До последнего времени для питания обмотки возбуждения применялись преимущественно специальные генераторы постоянного тока независимого возбуждения, называемые возбудителями В (рис. 1.3, а). Обмотка возбуждения (ОВ) получает питание от другого генератора (параллельного возбуждения), называемого подвозбудителем (ПВ).Ротор синхронного генератора, возбудителя и подвозбудителя располагаются на общем валу и вращаются одновременно. При этом ток в обмотку возбуждения синхронного генератора поступает через контактные кольца и щётки. Для регулирования тока возбуждения применяют регулировочные реостаты, включаемые в цепи возбуждения возбудителя r1 и подвозбудителя r2 .В синхронных генераторах средней и большой мощности процесс регулирования тока возбуждения автоматизируют.
В синхронных генераторах получила применение также бесконтактная система электромагнитного возбуждения, при которой синхронный генератор не имеет контактных колец на роторе. В качестве возбудителя в этом случае применяют обращенный синхронный генератор переменного тока В (рис. 1.3, б). Трехфазная обмотка 2 возбудителя, в которой наводится переменная ЭДС, расположена на роторе и вращается вместе с обмоткой возбуждения синхронного генератора и их электрическое соединение осуществляется через вращающийся выпрямитель 3 непосредственно, без контактных колец и щёток. Питание постоянным током обмотки возбуждения 1 возбудителя В осуществляется от подвозбудителя ПВ – генератора постоянноготока. Отсутствие скользящих контактов в цепи возбуждения синхронного генератора позволяет повысить её эксплуатационную надёжность и увеличить КПД.
В синхронных генераторах, в этом числе гидрогенераторах, получил распространение принцип самовозбуждения (рис. 1.4, а), когдаэнергия переменного тока, необходимая для возбуждения, отбирается от обмотки статора синхронного генератора и через понижающийтрансформатор и выпрямительный полупроводниковый преобразователь ПП преобразуется в энергию постоянного тока. Принцип самовозбуждения основан на том, что первоначальное возбуждение генератора происходит за счёт остаточного магнетизма машины.
На рис. 1.4, б представлена структурная схема автоматической системы самовозбуждения синхронного генератора (СГ) с выпрямительным трансформатором (ВТ) и тиристорным преобразователем (ТП), через которые электроэнергия переменного тока из цепи статора СГ после преобразования в постоянный ток подаётся в обмотку возбуждения. Управление тиристорным преобразователем осуществляется посредством автоматического регулятора возбуждения АРВ, на вход которого поступают сигналы напряжения на входе СГ (через трансформатор напряжения ТН) и тока нагрузки СГ (от трансформатора тока ТТ). Схема содержит блок защиты (БЗ), обеспечивающий защиту обмотки возбуждения (ОВ) от перенапряжения и токовой перегрузки.
Мощность, затрачиваемая на возбуждение, обычно составляет от 0,2 до 5 % полезной мощности (меньшее значение относится к генераторам большой мощности).В генераторах малой мощности находит применение принцип возбуждения постоянными магнитами, расположенными на роторе машины. Такой способ возбуждения даёт возможность избавить генератор от обмотки возбуждения. В результате конструкция генератора существенно упрощается, становится более экономичной и надёжной. Однако, из-за высокой стоимости материалов для изготовления постоянных магнитов с большим запасом магнитной энергии и сложности их обработки применение возбуждения постоянными магнитами ограничено машинами мощностью не более нескольких киловатт.
Синхронные генераторы составляют основу электроэнергетики, так как практически вся электроэнергия во всём мире вырабатывается посредством синхронных турбо- или гидрогенераторов.
Так же синхронные генераторы находят широкое применение в составе стационарных и передвижных электроустановок или станций в комплекте с дизельными и бензиновыми двигателями.
Трехфазный асинхронный двигатель с фазным ротором
До широкого распространения частотных преобразователей асинхронные двигатели средней и большой мощности делали с фазным ротором. Трехфазные асинхронные двигатели с фазным ротором (АДФР) обычно применяли в устройствах с тяжелыми условиями пуска, например в качестве крановых двигателей переменного тока, или же для привода устройств, требующих плавного регулирования частоты вращения.
Конструкция АДФР
Фазный ротор
Конструктивно фазный ротор представляет из себя трехфазную обмотку (аналогичную обмотки статора) уложенную в пазы сердечника фазного ротора. Концы фаз такой обмотки ротора обычно соединяются в «звезду», а начала подключают к контактным кольцам, изолированным друг от друга и от вала. Через щетки к контактным кольцам обычно присоединяется трехфазный пусковой или регулировочный реостат. Асинхронные двигатели с фазным ротором имеют более сложную конструкцию, чем у двигателей с короткозамкнутым ротором, однако обладают лучшими пусковыми и регулировочными свойствами.
Фазный ротор
Статор АДФР
Статор асинхронного двигателя с фазным ротором по конструкции не отличается от статора асинхронного двигателя с короткозамкнутым ротором.
Обозначение выводов вторичных обмоток трехфазного АДФР
Обозначение выводов обмоток ротора вновь разрабатываемых трехфазных машин согласно ГОСТ 26772-85
| Схема соединения обмоток, наименование фазы и вывода | Обозначение вывода | |
|---|---|---|
| Начало | Конец | |
| Открытая схема (число выводов 6) | ||
| первая фаза | K1 | K2 |
| вторая фаза | L1 | L2 |
| третья фаза | M1 | M2 |
| Соединение в звезду (число выводов 3 или 4) | ||
| первая фаза | K | |
| вторая фаза | L | |
| третья фаза | M | |
| точка звезды (нулевая точка) | Q | |
| Соединение в треугольник (число выводов 3) | ||
| первый вывод | K | |
| второй вывод | L | |
| третий вывод | M |
Обозначение выводов обмоток ротора ранее разработанных и модернизируемых трехфазных машин согласно ГОСТ 26772-85
| Схема соединения обмоток, наименование фазы и вывода | Обозначение вывода |
|---|---|
| Соединение звездой (число выводов 3 или 4) | |
| первая фаза | Р1 |
| вторая фаза | Р2 |
| третья фаза | Р3 |
| нулевая точка | |
| Соединение треугольником (число выводов 3) | |
| первый вывод | Р1 |
| второй вывод | Р2 |
| третий вывод | Р3 |
Примечание: Контактные кольца роторов асинхронных двигателей обозначают так же, как присоединенные к ним выводы обмотки ротора, при этом расположение колец должно быть в порядке цифр, указанных в таблице, а кольцо 1 должно быть наиболее удаленным от обмотки ротора. Обозначение самих колец буквами необязательно.
Пуск АДФР
Пуск двигателей с фазным ротором производится с помощью пускового реостата в цепи ротора.
Применяются проволочные и жидкостные реостаты.
Металлические реостаты являются ступенчатыми, и переключение с одной ступени на другую осуществляется либо вручную с помощью рукоятки контроллера, существенным элементом которого является вал с укрепленными на нем контактами, либо же автоматически с помощью контакторов или контроллера с электрическим приводом.
Жидкостный реостат представляет собой сосуд с электролитом, в котором опущены электроды. Сопротивление реостата регулируется путем изменения глубины погружения электродов .
Для повышения КПД и снижения износа щеток некоторые АДФР содержат специальное устройство (короткозамкнутый механизм), которое после запуска поднимает щетки и замыкает кольца.
При реостатном пуске достигаются благоприятные пусковые характеристики, так как высокие значения моментов достигаются при невысоких значениях пусковых токов. В настоящее время АДФР заменяются комбинацией асинхронного электродвигателя с короткозамкнутым ротором и частотным преобразователем.
ГОСТ 27471-87 Машины электрические вращающиеся. Термины и определения.
ГОСТ 26772-85 Машины электрические вращающиеся. Обозначение выводов и направление вращения.
А.И.Вольдек. Электрические машины. Учебник для студентов высш. техн. заведений. изд. 2-е, перераб. и доп.-Ленинград: Энергия, 1974.
Разновидности синхронных машин[ | ]
Однофазные индикаторные сельсины электровоза ВЛ80 Гидрогенератор — явнополюсный синхронный генератор, предназначенный для выработки электрической энергии в работе от гидравлической турбины (при низких скоростях вращения, 50 — 600 мин–1).
Турбогенератор — неявнополюсный синхронный генератор, предназначенный для выработки электрической энергии в работе от паровой или газовой турбины при высоких скоростях вращения ротора — 6000 (редко), 3000, 1500 об/мин.
Синхронный компенсатор — синхронный двигатель, предназначенный для выработки реактивной мощности, работающий без нагрузки на валу (в режиме холостого хода); при этом по обмотке якоря проходит практически только реактивный ток. Синхронный компенсатор может работать в режиме улучшения коэффициента мощности или в режиме стабилизации напряжения. Дает индуктивную нагрузку.
Машина двойного питания (в частности АСМ) — синхронная машина с питанием обмоток ротора и статора токами разной частоты, за счёт чего создаются несинхронные режимы работы.
Ударный генератор — синхронный генератор (как правило, трёхфазного тока), предназначенный для кратковременной работы в режиме короткого замыкания (КЗ).
Сельсин — маломощная синхронная машина, используемая как датчик угла поворота либо в паре с другим сельсином для передачи угла поворота без прямой механической связи.
Также существуют безредукторные, шаговые, индукторные, гистерезисные, бесконтактные синхронные двигатели.
Бесконтактная синхронная машина
Бесконтактный синхронный генератор ГТ40ПЧ6 (поз. 9) на авиадвигателе НК-8 В классической синхронной машине имеется слабое место — контактные кольца со щётками, изнашивающиеся быстрее других частей машины из-за электроэрозии и простого механического износа. Кроме того, искрение щёток может стать причиной взрыва. Поэтому сначала в авиации, а позже и в других областях (в частности, на автономных дизель-генераторах) получили распространение бесконтактные трёхмашинные синхронные генераторы. В корпусе такого агрегата размещены три машины — подвозбудитель, возбудитель и генератор, их роторы вращаются на общем валу. Подвозбудитель — синхронный генератор с возбуждением от вращающихся на роторе постоянных магнитов, его напряжение подаётся в блок управления генератором, где выпрямляется, регулируется и подаётся в обмотку статора возбудителя. Поле статора наводит в обмотке возбудителя ток, выпрямляемый размещённым на валу блоком вращающихся выпрямителей (БВВ) и идущий в обмотку возбуждения генератора. Генератор уже вырабатывает ток, идущий к потребителям.
Такая схема обеспечивает как отсутствие иных механических частей в двигателе, кроме подшипников, так и автономность работы генератора — всё время, пока генератор вращается, подвозбудитель даёт напряжение, которое может быть использовано для питания цепей управления генератором.
Недостатки
синхронных двигателей: 1. Сложность конструкции.
2. Сравнительная сложность пуска в ход.
3. Трудности с регулированием частоты вращения, которое возможно только путем изменения частоты питающего напряжения.
Указанные недостатки синхронных двигателей делают их менее выгодными, чем асинхронные двигатели, при ограниченных мощностях до 100кВт.
Синхронный и асинхронный генератор
Синхронный генератор конструктивно сложнее, например, у него на роторе находятся катушки индуктивности. Асинхронный генератор устроен гораздо проще — его ротор напоминает обычный маховик. Как следствие, среднестатистический асинхронный генератор лучше защищен от попадания влаги и грязи (говорят что он имеет закрытую конструкцию) и тут самое время вспомнить о классе защиты. Он обозначается двумя буквами (IP) и двумя цифрами. Первая цифра означает:
«2» защита от касания пальцами и от проникновения твердых посторонних частиц диаметром более 12 мм; «4» защита от касания инструментом пальцами или проволокой диаметром более 1 мм, защита от проникновения твердых посторонних частиц диаметром более 1 мм; «5» полная защита от касания вспомогательными средствами любого типа и от проникновения пыли. Вторая цифра: «3» защита от струй воды падающих под углом до 60 градусов от вертикали; «4» защита от струй воды падающих под любым углом;
Самый основной недостаток синхронного генератора — низкая степень защиты от внешних воздействий таких как: пыль, грязь, вода, т.к. синхронный генератор охлаждается «протягивая» через себя воздух, соответственно все что находится в воздухе может попадать в генератор. — для трёхфазных синхронных генераторов допустимый перекос фаз 33% — коэффициент нелинейных искажений 13-25% IP23 и 3-10% IP54 (в зависимости от производителя)
Синхронные генераторы, как правило, соответствуют классу IP 23, тогда как асинхронные IP 54. Впрочем, в последнее время практически у всех ведущих производителей появились инновационные синхронные агрегаты удовлетворяющие IP 54.
К сожалению асинхронники тоже не лишены недостатков. Способность «проглатывать» пусковые перегрузки ниже, чем у синхронных генераторов.
Асинхронный генератор (IP54) вообще не имеет обмоток на роторе. Для возбуждения ЭДС в его выходной цепи используют остаточную намагниченность якоря. Конструктивно такой альтернатор намного проще, надежнее и долговечнее. Кроме того, поскольку обмотки ротора охлаждать не нужно (их просто нет), корпус асинхронного генератора полностью закрыт, что позволяет исключить попадание пыли и влаги. Асинхронные генераторы не восприимчивы к коротким замыканиям, поэтому лучше подходят для питания сварочных аппаратов. — для трёхфазных асинхронных генераторов допустимый перекос фаз 60-70% — коэффициент нелинейных искажений 2-3%
Синхронные и асинхронные генераторы отличаются своими возможностями. Мнения специалистов тут расходятся (каждый естественно хвалит своё оборудование), но в среднем, всё выглядит примерно следующим образом: — синхронные альтернаторы легче переносят пусковые перегрузки и вырабатывают более чистый ток; — в силу простоты конструкции, асинхронные альтернаторы более устойчивы к короткому замыканию, поэтому лучше подходят для питания сварочных аппаратов.
Впрочем, в настоящее время существует множество способов улучшить выходные параметры мини электростанций. В частности, асинхронный генератор, оборудованный стартовым усилителем, способен справиться с пусковыми перегрузками, а качество выдаваемого электричества может быть повышено подключением AVR (автоматического регулятора напряжения). Кстати, на стабильность напряжения оказывает влияние и класс двигателя, а именно его способность поддерживать постоянные обороты (как правило, 3000) при изменениях нагрузки.
Синхронные генераторы обеспечивают поддержание напряжения в сети с высокой точностью (колебания в пределах 5%), поэтому позволяют подключать к ним аппаратуру чувствительную к перепадам напряжения, например, компьютеры, телевизоры и другие электронные устройства. Кроме того, такие генераторы без проблем справляются с энергоснабжением электроинструментов и электродвигателей, с реактивной нагрузкой до 65% от своего номинала.
Асинхронные генераторы менее точны: они поддерживают напряжение постоянным с точностью 10%, поэтому их нельзя применять для питания высокоточной аппаратуры (Hi-Fi техники и пр.). Подобные генераторы позволяют подключать к ним электроинструменты и электродвигатели с реактивной мощностью до 30% от номинала.
Наконец в качестве конструктивного исполнения более предпочтительны генераторы не оборудованные щетками (так называемые brush-less бесщеточные), так как они не требуют обслуживания и не создают помех.
Краткая история создания
Впервые возможность превратить электричество в механическую энергию открыл британский ученый М.Фарадей еще в 1821 году. Его опыт с проводом, помещенным в ванну с ртутью, оснащенной магнитом, показал, что при подключении провода к источнику электроэнергии он начинает вращаться. Этот нехитрый опыт наверняка многие помнят по школе, правда, ртуть там заменяется безопасным рассолом. Следующим шагом в изучении этого феномена было создание униполярного двигателя – колеса Барлоу. Никакого полезного применения он так и не нашел, зато наглядно демонстрировал поведение заряженного проводника в магнитном поле.
На заре истории электродвигателей ученые пытались создать модель с сердечником, двигающимся в магнитном поле не по кругу, а возвратно-поступательно. Такой вариант был предложен, как альтернатива поршневым двигателям. Электродвигатель в привычном для нас виде впервые был создан в 1834 году русским ученым Б.С. Якоби. Именно он предложил идею использования вращающегося в магнитном поле якоря, и даже создал первый рабочий образец.
Первый асинхронный двигатель, в основе работы которого заложено вращающееся магнитное поле, появился в 1870 году. Авторами эффекта вращающегося магнитного поля независимо друг от друга стали два ученых: Г.Феррарис и Н. Тесла. Последнему принадлежит также идея создания бесколлекторного электродвигателя. По его чертежам были построены несколько электростанций с применением двухфазных двигателей переменного тока. Следующей более удачной разработкой оказался трехфазный двигатель, предложенный М.О. Доливо-Добровольским. Его первая действующая модель была запущена в 1888 году, после чего последовал ряд более совершенных двигателей. Этот русский ученый не только описал принцип действия трехфазного электродвигателя, но и изучал различные типы соединений фаз (треугольник и звезда), возможность использование разных напряжений тока. Именно он изобрел пусковые реостаты, трехфазные трансформаторы, разработал схемы подключения двигателей и генераторов.
Источник
Подключение асинхронного двигателя
Трехфазный переменный ток
Электрическая сеть трехфазного переменного тока получила наиболее широкое распространение среди электрических систем передачи энергии. Главным по сравнению с однофазной и двухфазной системами является ее экономичность. В трехфазной цепи энергия передается по трем проводам, а токи текущие в разных проводах сдвинуты относительно друг друга по фазе на 120°, при этом синусоидальные ЭДС на разных фазах имеют одинаковую частоту и амплитуду.
Трехфазный ток (разница фаз 120°)
Звезда и треугольник
Трехфазная обмотка статора электродвигателя соединяется по схеме в зависимости от напряжения питания сети. Концы трехфазной обмотки могут быть: соединены внутри электродвигателя (из двигателя выходит три провода), выведены наружу (выходит шесть проводов), выведены в распределительную коробку (в коробку выходит шесть проводов, из коробки три).
Фазное напряжение — разница потенциалов между началом и концом одной фазы
Другое определение для соединения «звезда»: фазное напряжение это разница потенциалов между линейным проводом и нейтралью (обратите внимание, что у схемы «треугольник» отсутствует нейтраль)
Линейное напряжение — разность потенциалов между двумя линейными проводами (между фазами).
| Звезда | Треугольник | Обозначение |
|---|---|---|
| Uл, Uф — линейное и фазовое напряжение, В, | ||
| Iл, Iф — линейный и фазовый ток, А, | ||
| S — полная мощность, Вт | ||
| P — активная мощность, Вт |
Внимание: Несмотря на то, что мощность для соединений в звезду и треугольник вычисляется по одной формуле, подключение одного и того же электродвигателя разным способом в одну и туже электрическую сеть приведет к потреблению разной мощности. При этом не правильное подключение электродвигателя, может привести к расплавлению обмоток статора.
Пример: Допустим электродвигатель был подключен по схеме «звезда» к трехфазной сети переменного тока Uл=380 В (соответственно Uф=220 В) и потреблял ток Iл=1 А
Полная потребляемая мощность:
S = 1,73∙380∙1 = 658 Вт.
Теперь изменим схему соединения на «треугольник», линейное напряжение останется таким же Uл=380 В, а фазовое напряжение увеличится в корень из 3 раз Uф=Uл=380 В. Увеличение фазового напряжения приведет к увеличению фазового тока в корень из 3 раз. Таким образом линейный ток схемы «треугольник» будет в три раза больше линейного тока схемы «звезда». А следовательно и потребляемая мощность будет в 3 раза больше:
S = 1,73∙380∙3 = 1975 Вт.
Таким образом, если двигатель рассчитан на подключение к трехфазной сети переменного тока по схеме «звезда», подключение данного электродвигателя по схеме «треугольник» может привести к его поломке.
Если в нормальном режиме электродвигатель подключен по схеме «треугольник», то для уменьшения пусковых токов на время пуска его можно соединить по схеме звезда. При этом вместе с пусковым током уменьшится также пусковой момент.
Подключение электродвигателя по схеме звезда и треугольник
Обозначение выводов статора трехфазного электродвигателя
Обозначение выводов обмоток статора вновь разрабатываемых трехфазных машин согласно ГОСТ 26772-85
| Схема соединения обмоток, наименование фазы и вывода | Обозначение вывода | |
|---|---|---|
| Начало | Конец | |
| Открытая схема (число выводов 6) | ||
| первая фаза | U1 | U2 |
| вторая фаза | V1 | V2 |
| третья фаза | W1 | W2 |
| Соединение в звезду (число выводов 3 или 4) | ||
| первая фаза | U | |
| вторая фаза | V | |
| третья фаза | W | |
| точка звезды (нулевая точка) | N | |
| Соединение в треугольник (число выводов 3) | ||
| первый вывод | U | |
| второй вывод | V | |
| третий вывод | W |
Обозначение выводов обмоток статора ранее разработанных и модернизируемых трехфазных машин согласно ГОСТ 26772-85
| Схема соединения обмоток, наименование фазы и вывода | Обозначение вывода | |
|---|---|---|
| Начало | Конец | |
| Открытая схема (число выводов 6) | ||
| первая фаза | C1 | C4 |
| вторая фаза | C2 | C5 |
| третья фаза | C3 | C6 |
| Соединение звездой (число выводов 3 или 4) | ||
| первая фаза | C1 | |
| вторая фаза | C2 | |
| третья фаза | C3 | |
| нулевая точка | ||
| Соединение треугольником (число выводов 3) | ||
| первый вывод | C1 | |
| второй вывод | C2 | |
| третий вывод | C3 |